���ڹ��V�˶��Ĺ��l�������^���y����о�
�r�g��2021��11��15�� �������Փ�� �Δ���
����ժҪ���l�������(FSI)�^���y�༼�g���о��ȸߡ��`���Ⱥõȃ��c���ܵ��˴����b�������I��ďV���Pע����@�ø��ߵĜy�ྫ�ȣ�FSIϵ�y��������Ҫͨ�^�������w�o������x�Ԍ��F�����l׃���ľ��ܱO�y��Ȼ�����ܭh�������Լ�ɫɢЧ��Ӱ푣����w�o������x�Ĺ���y���ڜy���^���оS�ַ��������y�����ȇ����½���ᘌ��@һ���}�����������һ�N���ڹ��V�˶��Ĺ��l�������^���y���������HCN���w�����չ��V������FSIϵ�y�o������x��̵���λ���٘˶��ṩ���������_�Ĺ��l����;ͬ�r�������һ�Nɫɢʧ���`��Ŀ����a���������������w�o������x�����ɫɢʧ���`��y���Y����Ӱ푡�����C������������Ч�ԣ���20�ľ��x���c���ø���x�M�о��Ȍ��Ȍ����Y���������ڜy��������ԓϵ�y�����y��ƫ��С��μm���y���؏��ԃ���4μm��
�����P�I�~���l�������;�^�����x�y��;���չ��V;ɫɢЧ��
����1����
�����L���x���߾��Ȝy�༼�g�Ǵ����b�������I�����Ҫ֧�μ��g֮һ�����w�C�b�䡢�������졢���ͿƌW�x������ȹ��̺ͿƌW�΄��еõ��ˏV���đ���[1-5]���S�������I�����ֻ�����Ϣ�������ܻ��ķ����D׃�����ڜy�����ȡ��y��Ч�ʡ��y���`�����Լ��F����Դ�������ȷ��挦�F�еĜy�༼�g������µ�����[6-9]��
�����������o��ʮ����𣬹��l�������(FSI)�y�༼�g���䃞Խ�Ĝy�������c�`�����ܵ��ˏV�����Pע���䃞��Ĝy���`�����c�`�����x�������ڻع��^�������o����Ŀ����r����ɾ��x�y�����������O���S�����䝓�ڑ��È���[10-16]��Ŀǰ��FSI�y����ѿ����ڎ�ʮ�ķ����ȫ@�Ã���5×10-7(0.5ppm)�������y�ྫ�ȣ��c���ø���x�ஔ����ȫ�܉�M���ߴ������I�y�ྫ�ȵ�����չ�F���O��đ��Ý����c�о��rֵ[17-18]��
�������V�WՓ�ķ��������ڶ�ģ���w�ĸ߷ֱ��ʹ��V�x
������FSIϵ�y�У����x�Ĝy����Ҫͨ�^������l׃���c������̖��λ׃���g�ľ����Pϵ���F����ˣ��߾��ȵĹ��l�y���ֶ��DZ��CFSIϵ�y�y�ྫ�ȵ��P�I������FSIϵ�y�H����������ע������cݔ�����l׃���g�ľ����Pϵ������l׃����������������Ŀ��ƾ���ˮƽ��ԓ�ϵ�y�Ĝy�ྫ���y��ͻ��10-4����[19]��1995�꣬�����ʺ��M�о�����J.Thiel������FSI�y��ϵ�y�И�����һ�l��̲�s��2.7m���������o������x����ͨ�^�y���c�o������x��̖��λ׃���g�ľ����Pϵ���㱻�y���x����40m�ľ��x�ϫ@����±40μm�Ĝy�����_���ȣ���FSIϵ�y�й��l׃���ľ��ܜy���ṩ���µ�˼·��Ȼ�����w�e���ƣ����g��·�o������x�����m���ڹ��I�F�����F[20]��
����2005�꣬��Ъ����W��Hai-JunYang���˲���һ�_�߾�����(>200)�ķ��������_����x(Fabry-Perotinterferometer��FPI)��FSIϵ�y�м�������ݔ�����l�M�бO�أ����F�ˌ��^�����x�Լ���ӵĸ߾��Ȝy������Kԓϵ�y��0.1m��0.7m�Ĝy�������ȫ@����50nm���ҵĜy�ྫ�ȣ�ԓϵ�y�y�������^�ߣ���ֻ�m���ڭh�������Č���ҭh��[21]��2013�꣬���A��W�ąnjW���������ͨ�^�w����l�ጦ���{�C�������Ĺ��l�M��У�ʣ��Դ����������l�ʒ���ľ��ȣ����Դ˴��һ�����FSI�y��ϵ�y����1m�ľ��x�Ϝy�ྫ�ȃ���5μm[22]��
����Ȼ�����w����l���^�ߵijɱ�ʹ��Ŀǰ�y���ڹ��I�������ƏV���á�2014�꣬����W�ĕr������OӋ��һ�N�p��·FSIϵ�y�������L���w��ą��������·����̖����r����ڜy����·������̖���زɘӣ�ϵ�y�o������Ч��Q�˂��y���g��·�o������x���w�e���ƣ���K��10m�Ĝy�����x�ϫ@����50μm�ķֱ���[23]���ڴ�֮���P��FSIϵ�y�й��l�y�����������P�о���Ҫ�����ڲ���FPI���w����l���Լ��o������x������ĸ��M�c�M�ϣ��ԏ��a�������ȱ�ݣ�����ϵ�y�y�ྫ��[24-25]�����I�y���F�����H��Ҫ�y��ϵ�y�ṩ�߾��ȵĜy���Y����ͬ�r߀��ϵ�y�Ŀɿ��ԡ��������Լ������������Ҫ��
�����C�Ͽ��]ϵ�y���ȡ��w�e�Լ��ɱ����������w�o������x����Ŀǰ��FSI�y��ϵ�y����齛���ɿ���ͬ�rҲ�Ǒ������V���Ĺ��l�y���ֶΡ���@�ø��ߵĹ��l�y�����ȣ��o������x�Ĺ��������Ҫ�_����ʮ�����ϰ��ף�Ȼ�����ܜض�׃���ȭh������Ӱ푣��ӕr���w�Ĺ���y���ڜy���^���оS�ַ��������������L�ȅ������o������x��̰l��Ư�ơ����⣬���w��ɫɢЧ�����ڹ��l�{�C�^���������~�����λ׃�������y������x�c�o������x�g��ɫɢʧ�䣬���͜y�ྫ�ȡ�ᘌ��������}�������о��˻��ڹ��w�o������x��FSI�y��ϵ�yԭ����ӑՓ�������˭h���ض�׃���cɫɢʧ�䌦��K�y�ྫ�ȵ�Ӱ푡�
�����ڴ˻��A�ϣ�����˻������չ��V�Ĺ��w�o������x��̘˶�������ͨ�^�ض����՚��w��FSI�y��ϵ�y�ṩ����������Դ�Ĺ��l����������С��ϵ�y�ɱ��c�w�e��ǰ�����F��FSIϵ�y�й��w�o������x��̵���λ���٘˶���ͬ�r�������ɫɢʧ���`������a���㷨��ͨ�^���A���ʽ�M�Ϙ˶��˹��w�o������x�˶��^���е�ɫɢϵ������������ɫɢʧ���`��y��Y����Ӱ푡����ͨ�^�����C��������������Ч�ԣ��c���ø���x��20m�Ĝy�����x���M�о��Ȍ��Ȍ��Y��������ϵ�y�����y��ƫ��С��50μm���y���؏��ԃ���±4μm��
����2FSI�y��ԭ���c�`��ģ��
�������{�C�������l���ļ��⽛���w�������w������֞�ɲ��֣�һ�����M��y������x������������h��������ֱ��������Ŀ�˱��沢���أ��ڹ��̽�y��λ���c������l�����棬��Ɍ�Ŀ�˵Ľ^�����x�y��;��һ�����M���o������x�����^һ�����L�ӕr���w�������R�����¹��w����x��l�����棬���F�����������l�ıO�ء����������ƌ����l�F��FSIϵ�y�б��y���x��Ҫ�����y���c�o��������̖����λ׃�������Pϵ���o������x�Ĺ���Լ��՚������ʽ��㡣���У������L�ȅ������o������x���ֱ��Ӱ표y�ྫ�ȣ������Ҫ�L�ڱ��ָ߶ȵķ����ԡ�Ȼ��������һ�N���h���������еĹ�WԪ�������w�����ܵ��Ҝ�׃���Լ�ɫɢЧ����Ӱ푡�
����һ���棬���_�Ż���_�ŵĹ��I�F�����h���ضȲ��ӄ��ң����w�ĵ�Ч�������S֮�l��׃�����Ե��͵�SMF28��ģ���w���������������S�ضȵ�׃��ϵ���s��×10~12×10����ͬ�ض����o������x�Ĺ�̌����ھ�����һ���棬FSIϵ�y���{�C����һ����_100GHz~1THz�����ڹ��w���|�����^����ɫɢЧ��������چδι��l�{�C�^�����o��������̖��λ߀������ɫɢЧ��������~����λ׃���������ɿ՚��·���ɵĜy������x��̖�У�ɫɢЧ����Ӱ푅s���Ժ��Բ�Ӌ���@Ҳ�����˃�·������̖�g����ɫɢʧ�䆖�}�����͜y�ྫ�ȡ�
����3��̘˶��cɫɢʧ���`���a������
����ͨ�^��������Y�����Կ������o������x�Ĺ��Ư���Լ�ɫɢ���}��FSIϵ�y�Ĝy�ྫ������ˇ��ص�Ӱ푣���횲�ȡ��ʩ����������ᘌ��������}����������˻������չ��V�Ĺ��w�o������x��̘˶��������Խ�Q���ӭh����FSIϵ�y���o������x��̵��L�ڷ����Ԇ��};��������˻��ڶ��ζ��ʽ�M�ϵ�ɫɢʧ���`���a��������������ɫɢʧ���`���ͬ�r�ṩ�˘˶��^�������ɫɢ���ϵ����
����3.1�������չ��V�Ĺ��w�o������x��̘˶�����
�����h���ضȌ��o������x��̵�Ӱ푇���������FSIϵ�y�Ĝy�ྫ�ȣ�һ��ͨ�^���ژ˶��o������x��̽�Q���������ø���x�ṩ�˜��L�ȣ������ô��yFSIϵ�y��ԓ�ξ��x�M�Мy�������ͨ�^����ʹ�Üy�ʽ��ɘ˶��^�̡�ԓ������Ҫ�Lֱ����܉�����o���b�ã������������o���ڹ��I�F�����F�����ؽ���о�һ�N�߾��ȡ�����Դ�Ŀ��٬F���˶����������F�o������x��̵���λ���¡�
����2014�꣬ţ���W��JohnDale���ˌ���NIST�˶��Ę˜�HC13N���w���ճؑ�����FSIϵ�y�У����F���o������x��̵��ھ�У�ʣ���ȡ�������õ�Ч������K��0.2m~20m�Ĝy�������ȫ@����0.41ppm���������_����[27]�����Q�������}�ṩ���µ�˼·��Ȼ����ԓ�����Դ���һ�������ԣ����ȣ��˜ʚ��w���ճص������V���c���w�������P���ܼӹ����ȵ�Ӱ푣����y�����cNIST�ṩ�ęz���C����ȫһ�¡���Σ�NIST�ṩ�����շ匦�����L���ȃH��ׂ�Ƥ�ף��y�ԝM��FSI�y��ϵ�y�ľ�������
�������⣬����������o������x��ͨ�^�䓴�����ɿ��g�o������x���w�e���o���ڹ��I�F�����H���ã����ڹ��w�o������x�ڹ��l�{�C�^���д���ɫɢЧ���������˶��Y���a��Ӱ푣���ˣ���회����M���a����ᘌ��������}�����������һ�N�������չ��V�Ĺ��w�o������x�˶����������ȣ������i�����犵��w����l�ጦ���w���ճص����չ��V�M���A�Ș˶��������w����l������S���Ҝʴ_����Դ�Ĺ��V��������˿��Ԝʴ_�ش_�����չ��V�g�ľ��x�������˶����ȡ����{�C�������l���ļ���֞��������֣�һ�����c�i�����犵��w����l�Ὓ��W�������Ϯa������;��һ�����M����w���ճأ�����̖�����̽�y������;��������ֱ��ͨ�^���̽�y�����գ����ڱO�ؼ��⏊�ȵIJ��ӡ�
�������{�C�������l���Ē��l�����c�w����l��l�����棬�a��������ͬ�l�ʵ����l��̖��ͨ�^�{��PD����������늌W�V�������V�����l�����c�����һ�����X�a�������l��̖��ԓ��̖���l�ʌ��S���l����ʬF�����Ը�׃�������l��̖����r���f�����l�����cijһ���l���X�l���غϣ��˕r���l����Ĺ��l����ԓ���l���X�����Ĺ��l���c��ͬ�r�����^���w���ճصĒ��l�����ض��V��λ�ðl�����գ���⏊�Ȱl���½�������̖�����M�Кwһ����ͨ�^��˹�M���㷨���ɫ@��ÿ�������V����ֵ�����ĕr�g��ͨ�^���l��y�õĹ��l—�r�g��������ͨ�^��ֵ����Ӌ���V���g�����Ĺ��l��Ķ����F�����w���ճصľ��_�˶���
�����������˶��õĚ��w���ճ�����FSIϵ�y����Ɍ����w�o������x��̵Ę˶������M���FSIϵ�y��D6��ʾ�����{�C�������a���ļ��ⱻ�֞��IJ��֣���һ�����M��y������x����ɽ^�����x�y��;�ڶ������M���o������x�����r�O�ؿ��{�C��������ݔ�����l;�������ֹ⽛���w����ǻ�䱻���̽�y�����գ������o������x��̵Ę˶�;���IJ���ֱ�ӱO�ؼ�������ݔ�����Ȳ��ӣ��������������չ��V������̖�Ěwһ��̎����
����3.2ɫɢʧ���`���a������
���������ڶ���������ɫɢʧ���`��ģ�ͣ����o������x����ɫɢЧ���r������λ׃�����F����l�����һ�A��λ׃���Լ�ɫɢ����Ķ��A��λ׃���įB�ӡ�ᘌ��@һ���c���҂������һ�N���ڶ��A���ʽ�M�ϵ�ɫɢʧ���`���������������ȣ��c���չ��V��̖��ƣ����������������l�{�C�Ǿ��Ԇ��}��ͨ�^�o��������̖���^���c�����r���̖�������ڴˌ��y������x��̖�M���زɘӡ�
����4����cӑՓ
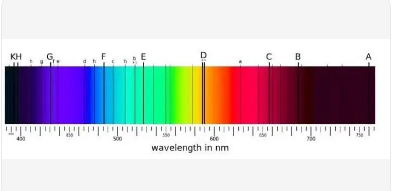
�������u��������������Ч�ԣ���˚��w���ճؘ˶�ϵ�y�cFSI�^���y��ϵ�y���M������C��ϵ�y�У����{�C��Դ�����ǵ¿Ƽ�(Keysight)���a��81606A�Ϳ��{�C������������^�����{�C�ٶȼ������քe�O�Þ�20nm/s�Լ�1520nm~1535nm�����ژ˶����w���ճص��w����l��(MenloSystem��FC_1500_250_ULN)���l�O����250MHz�������i�������ϡ����w���ճ��x��WavelengthReference��˾���a�Ļ�Ϛ��w���ճ�(TRIH(80)-5/150/150-FC/APC)������HCN��C12O��C13O���N���w�����V�������w1519nm-1632nm������HCN���w�����չ��V�����܉���1519nm~1557nm�ķ������ṩ54�������V����ƽ���g��0.6nm~0.7nm��
�����o������x����SMF-28�͆�ģ���w����ӕr���w���L�ȼs��110m�����й����̖��ͨ�^���̽�y��(PDB450C,Thorlabs)���գ�����һ�_���ٔ��ֻ��x(NationalInstruments��PXIe-5162)��20MS/s���ٶȲɼ����惦����λ�C��������̎��ͨ�^Matlab�x�����F��
�������ȣ������w����l�ጦ���w���ճص����չ��V�M�И˶������ڹ��̽�y������ֵ�^�ͣ���˲��ù�W�V�����V���{�C�����ȵĹ��l���X����ͨ�^���s���w�Ŵ���(EDFA)�M�зŴ�������������̖�ď��ȡ�ͬ�r������x��ͬ���X�c���{�C�������a�������l��̖�����̽�y�����յ���̖���Ŵ��ͨ�^һ����ͨ�V����(���ƣ�������4MHz�������l�ʣ�3MHz)�ԺY�x���ض������l�������O�����{�C�����������������^���й��܉�a��26�����շ�(R23branch~P2branch)���زɘӺ�����չ��V��̖�c�������l��̖�����ڹ��V��������^�ͣ���̖�а����˴����S�C�����齵���䌦�l�V�M�Ͼ��ȵ�Ӱ푣�����̖�M�е�ͨ�V��̎�����V����̖�еĸ��l���ɷ֡�֮��ÿ�����X�M�и�˹�M�Ͽ��Կ������M�������cԭ��̖�ʬF���^�õ�һ���ԣ��܉�ʴ_�ض�λ���շ匦����λ�á�
������������A�˶����������Ȳ���ԓϵ�y�ڲ�ͬ�Ĝض���ͬһ���x�M���؏͜y��������C������������Ч�ԡ����ڌ���҃ȭh���ض������������y����Ч�{��������҂������w�o������x����ˮ̎������]��ˮ�У�ʹ��ض��Sˮ�ذl��׃����ͨ�^ʹ�Ü�ˮ��Ȼ���ص��^�́�ģ�M�h���ض�׃�����o������x��̵�Ӱ푡�
�����ڴ��^���У��y��ϵ�y��ͬһĿ�˵ľ��x�M���B�m�O�y���c��ͬ�r��ͨ�^�߾��Ȝض�Ӌ�O�yˮ���S�r�g��׃���������ڌ���^���У��鱣�C�o������x�cˮ�w�ضȱ���һ�£��ڌ��ǰ����ʹϵ�y�o��1С�r����ʹ�o������x�cˮ��څ����ͬ��������У��_ʼ�y���r�̵�ˮ�w�ضȞ�40.1�棬���s1.6С�r����30.3�档�����^���У�FSI�y��ϵ�y�Դ�s20sһ�ε��ٶȌ�Ŀ�˾��x�M���B�m�y����ͬ�rÿ5���ӛ�һ��ˮ�w�ضȡ�
�����tɫ������ˮ���S�r�g׃��Ҏ�ɣ���ɫ������ͨ�^���Ҙ˶��õ��Ĺ��w�o������x�Ĺ�̣����Կ���������׃��څ�ݷdz����ƣ��@Ҳӡ�C�˵ڶ����ƌ��ĽYՓ���D9(b)��ϵ�y��ʹ�ù��V�˶��o������xǰ��ͬһĿ�˵Ĝy��Y��������δ�˶���ϵ�yֻ�܉����0�r�̵��o������x��̣��S���ض���u���ͣ����x�y���`����u������ˮ�ؽ���10��y���`���ѽ��_����1.8mm���ң����^֮�£�ͨ�^���w���ճؘ˶����FSIϵ�y�y��Y��������׃���@Ҳ�C����ԓ��������Ч�ԡ�
������K��12m���ҵľ��x�ϣ�ԓϵ�y�Ĝy���˜ʲ��68μm�������؏��Ծ��ȼs��5.28×10���@һ�`����Ҫ�����o������x�˶��^���еĹ�̵��S�C���ӣ��ڌ��H�����У��ض�׃�����^�ڱ������Ӿ�������˿����J���ڶ�Μy�����^���У��o������x���׃�����OС����˿���ͨ�^���ȡƽ���ķ��������S�C�`��y���Y����Ӱ푣��Mһ������ϵ�y�Ĝy�ྫ�ȡ�
����5�YՓ
����ᘌ������b�������I�߾��Ƚ^���y�༼�g���������о��˻��ڹ��l�������ĸ߾��Ƚ^���y�����ᘌ�FSIϵ�y�й��w�o������x��������ܭh������Ӱ푵Ć��}������˻������չ��V�Ĺ��w�o������x��̘˶�������ͨ�^�ض����w���_�ҷ��������չ��V���o������x�Ę˶��ṩ�˸߾��ȹ��l���ʣ����F��FSIϵ�y�L�ȅ�������λ�˶�;ͬ�r�������ɫɢʧ���`������a���㷨�������������l����Ĝy���`���������ͨ�^���Ȍ��Ȍ��õ�����Ч��C����Kԓϵ�y��20m�Ĝy�����x�ϫ@���˃���50μm�Ĝy�ྫ�ȣ��y���؏��ԃ���±4μm��
���������īI
����[1]ZhaoJG,GuoHJ.StudyandApplicationofDigitalMeasurementTechnologyforAircraftAssemblyPrecision[J].AeronauticalManufacturingTechnology,2016,59(20):24-27.�w����,�����.�w�C�b���|�����ֻ��z�y���g�о�������[J].�������켼�g,2016,59(20):24-27.
����[2]ZhaoX,YangHM,QiangJ,etal.High-PrecisioncoherentlaserrangingmethodbasedonKalmanfiltering[J].Actaopticasinica,2020,40(15):1412001.�w�t,��R,����,��.���ڿ������V���ĸ߾�����ɼ���y���[J].��W�W��,2020,40(14):1412001.
����[3]CuiPF,YangLH,LinJR,etal.Applicationoffemtosecondopticalfrequencycombinpreciseabsolutedistancemeasurement[J].Laserandoptoelectronicsprogress,2018,55(12):120011.���i�w,�����x,�ּ��,��.�w���W�l�����ھ��ܽ^���y���еđ���[J].�����c����ӌW�Mչ,2018,55(12):120011.
�������ߣ����������v�w���ּ�������x������ۥ�^�F
- ��������^���о������Ⱥ����rֵ�c��ʩ
- ����ϵ�y�^�Ķ�������Ч�ܼ���̽��
- ���ڮa�I���Փ�Ą���IP�_�l·��̽��
- �����Ͼ������z�a���ֻ��y�L���Ą��aƷ�OӋ�о�������
- ������������c������R���q�C�ǶȌ��F�ڄӽ����lչ�ărֵ�Jͬ��;��
- ���� AHP-TOPSIS-POE ģ�͵ĸ�УУ�@���^�|���u�r�о��Թ����� 4 ����У����
- ���ڷ�����̓�M�����g�Ĕ������ľW�j��ȫ�OӋ
- ���ڲ����ںϵIJ�a�I�lչ�����о��Գ����г����^�P��ɽ����
- ����ؔ�շ���ҕ�ǵ�������I�ɱ����Ƹ��M��ʩ
SCI�ڿ�Ŀ�
���T�����ڿ�Ŀ�
SCIՓ��
- 2025-01-254��������ԃr��SCI�ڿ����]��
- 2025-01-23�Ԅӻ��c����ϵ�y4�^�ڿ�IMA J M
- 2025-01-23��SCI�ܸ��������Щ������
SSCIՓ��
- 2025-01-25ͨ�^�ʸ�!���]6�����ðl��ˇ�gSS
- 2025-01-22�Z�Ԍ��I�о����m��Ͷ�������ڿ�
- 2024-12-24�����ssci�ڿ���ȫ����������ss
EIՓ��
- 2025-01-24�������eiՓ��ˮƽ
- 2024-12-282024.11��EI�ڿ�Ŀ䛣�����18��
- 2024-12-262025�꼴���e�k���t�W���H���h
SCOPUS
- 2025-01-24scopus�l�����¸�ʽ��ָ��
- 2024-11-19Scopus��䛵Ľ���������ڿ�
- 2024-05-29scopus�����Щ������ڿ�
���g��ɫ
- 2024-11-22���H�����ڿ��l��Փ�đ�ԓ��ʲô
- 2024-11-22���H���Ľ̎����ڇ��H�����ڿ��l
- 2024-11-22���H�����ڿ��u�Q���J��
�ڿ�֪�R
- 2025-01-24�ڿ��κˡ��p����ʲô��˼
- 2025-01-23���н�ͨ�lչ���P�����m��Ͷ����
- 2025-01-21�������w�W�����ڿ��ϼ�
�l��ָ��
- 2025-01-25Փ��Ͷ��ǰҪ�z����Щ����?
- 2025-01-24�t�W�о����Į��IՓ���x�}�v��
- 2025-01-23�����Ļ������Փ���īI39ƪ