����ģ�����Ƶ�늄���܇��������ϵ�y����
�r�g��2020��01��03�� ������Փ�� �Δ���
����ժҪ:ᘌ���τ�����܇�ͼ�늄���܇�����������}������܇β���ŷţ��S��늳�SOC�Լ��_���{�T���������܇��������Ҫ���Ï��s��ģ������ϵ�y����ģ�����������뵽���Ѓ�ȼ�C����׃���̈́ӑB�Ƅ�ϵ�y��������������ϵ�y���b���С��������m��Ҏ�t�죬ͨ�^�^���`�ٺ����ҳ�������ݔ��ֵ����K�܉�ͨ�^���ķ�Ӌ����挍ֵ���_��ȥģ����Ŀ�ģ��Ķ��ó��YՓ��
�����P�I�~:늄���܇;����ϵ�y;ģ������;������
�������PՓ�ķ�����x���Б�늄әC������ͼ��\����о�
��������������Ҫ���Б�늄әC�Ĺ�����ͺͳ��ù����\����M���˾C����������������������Б�늄әC���N��Ҫ���ϵ��\����M�з�����Ȼ��Y�ϲ��C���D����Ӌ�㣬Nuttall�����V����ֵ�����㷨��CZT�l�V�������g�������xȡRat�����D�Ӕ��l����������������ؓ�d���������ֵ�r������`�У��˕r�˲���Hilbertģ���l�V�����������ĵ��о����S�й��ϕr���ؘ���������M�жര���V�������܉�ͻ���S�й��������l�ʡ�
��������ͨ�^�\�Ï��s��ģ������ϵ�y�M����Դ�����͌����Ʋ��Ԉ��Ё팍�F���̶ȵ����ȼ�ͽ����ԣ��p���ŷţ����ڃɂ�������Դ֮�g�����{�T�Ą���Ҫ�����܉����{�T�������κΕr�����ȼ�ϵĽ����ԣ����ṩ�ӑB��˲�r����;���һЩ�������ԣ���܇�v���١�
����1����ģ��������Փ��ģ��������
�����������ς���ϵ�y������һ�����Ǿ��Ժ͕r׃�Č���ģ��߉�ƺ��ǽ�Q�@һ���}��������ķ������������m�ô_����Ҏ�t����������ģ��߉�ěQ�����ԣ����F���r�����Ĺ��ʷ��䡣ģ��������������ֵ��ģ��ֵ��׃����
�������ڃ�ȼ�C(ICE)�ٶȣ�������ֵ������2000rpm�����҃�ȼ�C�ٶȵ�Ҏ�t������“���ICErpm̫�ͣ��tע�����ȼ��”���c“IfX��thenZ”�Z�����P��ģ��ֵ����X<2000rpm��Ҏ�t����һϵ��Ҏ�t:�����_�l�͑��Ô��ق�Ҏ�t������C�����x��Ҏ�t����ݔ�롣ȥģ�����������^�̵ĽY���D�Q������ֵ��ݔ����
����2��ģ���������\�õ������
����ģ������ϵ�y�M������Ŀ��:�p��NOx�ŷţ��S��늳�SOC���_���{�TҪ�������Ť�ش�ģ������ϵ�y��ݔ���:����̤���г�(Acc)��늄���܇�ٶ�(EM)��
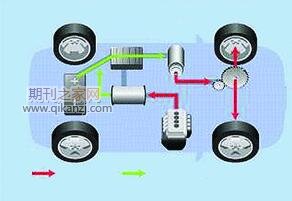
����2.1��������ϵ�y
��������ϵ��ʹ�õĸБ�늄әC(IM)ֱ���B�ӵ���ȼ�C�����ڸБ�늄әCֱ����ϵ����̓�ȼ�C������ڴ������ȼ�C�\��������̎�����Ņ^���S����ȼ�C�ٶ����ӣ��l�Ť�pС�������D��������Ť���c�~��Ť�صı��ʶ��x��K����K��ʾ�Б�늄әC�䮔���Դ��ؓK��ʾ�Б�늄әC�䮔�l늙C�����_��K��Ť�������׃��:Ť��ָ��=Kx�~���D�ص��D�١�
����2.2ģ��߉�Č��F
����ģ��߉��ݔ��/ݔ���`�ٺ������������]�����ӣ��Ѓɂ�ݔ��׃������:����̤���г�Acc�Б�늄әC�D��wrpm��ݔ��׃���ķ����O������:���{�T������������̤��r��ACC�O�Þ��㣬���{�T��ȫ���¼���̤��r��ACC�O�Þ�100��wrpm���Ը�׃�IJ��̓�ȼ�C�Ŀ��D�ٶȵ���������ٶȡ�ݔ����Ť�������c�~���D��Ť�صĚwһ�����ʡ�ݔ���ݔ����0��1֮�gҎ����
����3�YՓ
��������ͨ�^����τ�����܇�ͼ�늄���܇���о��d�w������늄�܇��ͬ�����Ŀ���Ҫ��������������b�ý�����һ��ģ������ϵ�y�����F��늄�܇�����������Ġ�B���܉�M���{�T�������p��β���ŷţ��S��늳�SOC�Ć��}��
���������īI:
����[1]�ٝ���T���d����.����ģ���㷨�ļ�늄���܇�Ƅ���������[J].�V���Ƽ���W�W��2014��25(3):32-42.
����[2]ʯ��.��τ���ϵ�y���Ʋ��Լ�ƥ�䑪���о�[D].���ϴ�W��2014.
����[3]��Ǽң�����S���Wꖺ�.��τ�����܇���Ʋ����о��F��lչڅ��[J].��܇���̎���2009.
����[4]���ͣ��O�ɲ�����.늄���܇�Ƅ���������ϵ�y�о�[J].�r�I�Cе�W��2012.
����[5]BrianSu-MingFan.MultidisciplinaryOptimizationofHybridElectricVehicles:ComponentSizingandPowerManagementLogic.UniversityofWaterloo��2011.
����[6]���壬κ��.����ģ�����Ƶďͺ��Դ��������ϵ�y�����о�[J].�r�I�b���c܇�v���̣�2013.
- �Ԅӿ���ϵ�y��ij���µVɽ���о�����
- ������Ӌ�������O�����ܱO�yϵ�y
- �����¼��Ķ˵���ҕ�Xλ���R�e���O���W�j�ܘ�
- �����_Դ���g���O�I�վC�ϱO��ƽ�_��̽���c���`
- �������l���g�Ĕ��ּ����·�ϻ��������ܶ�λϵ�y
- �����˹����ܵęC�����赸�����Ԅ������о�
- һ�N����ҕ�l�z�y���g�Ľ�ͨ·�ڈ��ڙC����
- С�ӱ��»���CNN-DCGAN����|�ֲ����ģʽ�R�e����
- ���ڻ���µ��F�ˆT��ɢ��늚�ϵ�y�OӋ�о�
SCI�ڿ�Ŀ�
���T�����ڿ�Ŀ�
SCIՓ��
- 2025-01-254��������ԃr��SCI�ڿ����]��
- 2025-01-23�Ԅӻ��c����ϵ�y4�^�ڿ�IMA J M
- 2025-01-23��SCI�ܸ��������Щ������
SSCIՓ��
- 2025-01-25ͨ�^�ʸ�!���]6�����ðl��ˇ�gSS
- 2025-01-22�Z�Ԍ��I�о����m��Ͷ�������ڿ�
- 2024-12-24�����ssci�ڿ���ȫ����������ss
EIՓ��
- 2025-01-24�������eiՓ��ˮƽ
- 2024-12-282024.11��EI�ڿ�Ŀ䛣�����18��
- 2024-12-262025�꼴���e�k���t�W���H���h
SCOPUS
- 2025-01-24scopus�l�����¸�ʽ��ָ��
- 2024-11-19Scopus��䛵Ľ���������ڿ�
- 2024-05-29scopus�����Щ������ڿ�
���g��ɫ
- 2024-11-22���H�����ڿ��l��Փ�đ�ԓ��ʲô
- 2024-11-22���H���Ľ̎����ڇ��H�����ڿ��l
- 2024-11-22���H�����ڿ��u�Q���J��
�ڿ�֪�R
- 2025-01-24�ڿ��κˡ��p����ʲô��˼
- 2025-01-23���н�ͨ�lչ���P�����m��Ͷ����
- 2025-01-21�������w�W�����ڿ��ϼ�
�l��ָ��
- 2025-01-25Փ��Ͷ��ǰҪ�z����Щ����?
- 2025-01-24�t�W�о����Į��IՓ���x�}�v��
- 2025-01-23�����Ļ������Փ���īI39ƪ